



협동 로봇(Collaborative Robot) 완벽 가이드: 안전과 공존의 자동화
협동 로봇(Collaborative Robot):
안전 펜스를 넘어선 생산성의 혁명

인간과 로봇의 완벽한 팀플레이를 위한 안전 솔루션:
PLe Cat.4 안전 등급부터 0.05mm 정밀 제어, 스마트 팩토리 연동까지

1. 협동 로봇이란 무엇인가? (Deep Dive)
협동 로봇(Collaborative Robot)은 인간과의 직접적인 상호작용을 전제로 설계된 로봇입니다. 기존 산업용 로봇이 강력한 힘과 속도를 위해 펜스 내에서 격리되어야 했다면, 협동 로봇은 ISO 10218-1 규격을 준수하여 작업자와 부딪혀도 즉시 정지하거나 힘을 제한하여 상해를 입히지 않습니다.
2026년형 최신 코봇은 AI 비전 센서를 통한 인지 능력과, 작업자가 로봇 팔을 직접 잡고 움직여 동작을 가르치는 '직접 교시(Direct Teaching)' 기능을 통해 비전문가도 1시간 내에 현장에 투입할 수 있는 유연성을 갖췄습니다.
전통 산업용 로봇 대비 핵심 가치
1. 안전성 (Safety First)
펜스 설치가 불필요합니다. 고성능 토크 센서가 충돌을 감지하면 0.001초 내에 정지하며, PLe Cat.4 등급의 안전 기능이 이중으로 작동합니다.
2. 공간 효율성 (Compact)
사람 한 명이 서 있을 공간만 있으면 설치가 가능합니다(Minimal Footprint). 이동형 대차(Mobile Cart)에 실어 여러 공정에 유연하게 재배치할 수 있습니다.
3. 빠른 ROI (Investment)
펜스 설치 비용이 없고 셋업 시간이 짧아, 소량 다품종 생산 환경에서 통상 10~14개월 이내에 투자 비용을 회수할 수 있습니다.
2. 기술 심층 분석: 관절 토크 센서와 안전 제어
협동 로봇의 핵심은 '어떻게 사람을 느끼는가'입니다. 저가형 전류 제어 방식과 프리미엄 토크 센서 방식의 차이를 이해해야 합니다.

| 기술 구분 | 전류 제어 방식 (Current-based) | 토크 센서 방식 (Torque Sensor) |
|---|---|---|
| 감지 원리 | 모터 전류 변화량으로 외력 추정 | 관절의 센서로 직접 힘 측정 |
| 민감도 | 낮음 (마찰, 온도 영향 받음) | 매우 높음 (미세 접촉 감지) |
| 힘 제어 정밀도 | 낮음 (오차 범위 큼) | 높음 (조립/연마 공정 필수) |
| 비용 | 저렴 (보급형) | 고가 (프리미엄) |
3. ROI 분석: 인력 대체 효과와 생산 유연성
협동 로봇은 단순 반복 작업에서 작업자를 해방시키고, 24시간 가동을 통해 생산성을 극대화합니다.
| 비교 항목 | 작업자 수동 작업 | 협동 로봇 도입 (1대) | 개선 효과 |
|---|---|---|---|
| 가동 시간 | 8시간 (휴식 필요) | 24시간 연속 가동 | 가동률 300% 향상 |
| 운영 비용 (연간) | 4,000만 원 (인건비) | 100만 원 (전기/유지보수) | 3,900만 원 절감 |
| 품질 (Quality) | 휴먼 에러 발생 가능 | 반복 정밀도 ±0.05mm | 불량률 제로화 |
4. 도입 예산 가이드: 가반 하중(Payload)별 가격 (Budgeting)
로봇 가격은 가반 하중과 작업 반경(Reach)에 따라 결정되며, 그리퍼와 비전 시스템 비용은 별도입니다.
1. 경량 작업용 (Payload 3~5kg)
2,000만 원 ~ 3,000만 원주요 스펙: 작업 반경 600~900mm. 소형 전자부품 조립, F&B(커피/치킨), 검사 공정에 적합하며 좁은 공간에 설치하기 좋습니다.
2. 표준 작업용 (Payload 10~15kg)
3,500만 원 ~ 4,500만 원주요 스펙: 작업 반경 1,000~1,300mm, 고성능 토크 센서. CNC 머신 텐딩, 박스 포장, 폴리싱(연마) 등 범용적인 작업에 최적화된 모델입니다.
3. 중량 작업용 (Payload 20kg+)
5,000만 원 이상주요 스펙: 작업 반경 1,700mm 이상. 무거운 박스 적재(Palletizing)나 대형 가공물 핸들링 시 작업자의 근골격계 질환을 예방합니다.
5. Industry 4.0: 스마트 팩토리 데이터 연동
협동 로봇은 Modbus TCP, Ethernet/IP 등 산업용 프로토콜을 통해 공장의 지능형 에이전트 역할을 수행합니다.
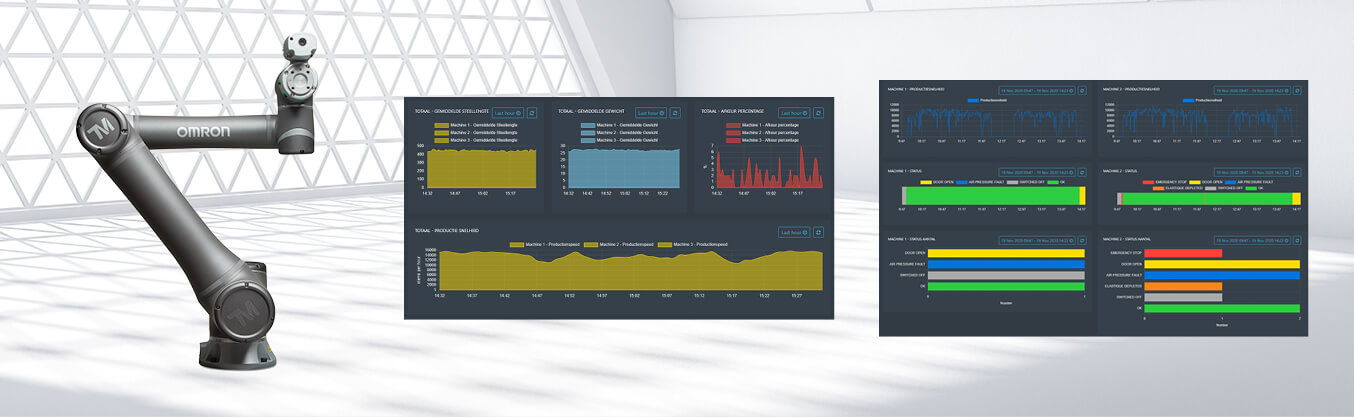
- 원격 모니터링: 태블릿이나 PC에서 로봇 상태를 확인하고, 에러 발생 시 원격 접속하여 리셋 및 복구할 수 있습니다.
- 비전 시스템 통합: 컨트롤러 내장 소프트웨어로 별도 PC 없이 카메라를 연결, 좌표 보정 및 불량 검사를 수행합니다.
- 플러그 앤 플레이: 다양한 그리퍼와 센서를 드라이버 설치만으로 즉시 인식하여 셋업 시간을 획기적으로 단축합니다.
6. 엔지니어를 위한 예방 정비(PM) 체크리스트
| 점검 주기 | 핵심 점검 항목 (Check Point) |
|---|---|
| 매일 (Daily) | 비상 정지 버튼 작동 테스트, 이상 소음/진동 청음, 케이블/튜브 손상 여부 확인 |
| 매월 (Monthly) | 컨트롤러 냉각 팬 필터 청소, 베이스 및 그리퍼 고정 볼트 풀림 확인(토크 렌치) |
| 연간 (Yearly) | 감속기 구리스 보충/교체, 브레이크 작동 테스트, 엔코더 데이터 백업 배터리 점검 |
7. 실무 FAQ: 현장 엔지니어의 핵심 질문
Q. 펜스 없이 쓰면 속도가 느린가요?
A. 안전 규정상 사람이 근처에 있으면 250mm/s 이하로 제한됩니다. 하지만 '안전 영역 스캐너'와 연동하여 사람이 없을 때는 고속으로, 접근 시 저속으로 가변 제어하면 생산성을 확보할 수 있습니다.
Q. 프로그래밍을 몰라도 쓸 수 있나요?
A. 가능합니다. '직접 교시(Direct Teaching)' 기능을 통해 로봇 팔을 손으로 잡고 움직여 점을 찍는 방식으로 경로를 생성합니다. 스마트폰 사용 능력만 있다면 1시간 교육으로 운용 가능합니다.
Q. 로봇 수명은 얼마나 되나요?
A. 설계 수명은 약 35,000시간(5~7년)입니다. 정격 하중의 80% 수준에서 운용하고, 급격한 가감속을 피하는 부드러운 모션을 설정하면 감속기 수명을 연장할 수 있습니다.
8. 산업별 성공 도입 사례 (Case Study)
가공 시간이 긴 작업에서 작업자의 대기 시간을 없애기 위해 이동형 로봇을 도입했습니다. 로봇 1대가 CNC 2대를 담당하여 소재 투입/배출을 자동화하고, 가동률을 95%까지 끌어올렸습니다.
15kg 박스를 하루 종일 적재하는 작업에 20kg 가반 하중 로봇을 투입했습니다. 바닥부터 2m 높이까지 정밀하게 적재하며, 작업자의 근골격계 질환 호소 및 이직률을 제로화했습니다.
힘 제어(Force Control) 기능을 활용하여 나사 구멍을 정밀 탐색해 체결하고, 일정한 압력으로 본드를 도포하여 작업자 손떨림으로 인한 품질 불량을 완벽하게 해결했습니다.
9. 장애 원인 및 대책 (Troubleshooting)
| 트러블 현상 (Error) | 원인 및 해결 (Solution) |
|---|---|
| 보호 정지 (Protective Stop) | 충돌, 급가속, 하중 설정 오류 → 장애물 제거 및 가속도/민감도 조절 |
| 관절 과열/과부하 | 가반 하중 초과, 연속 동작 → 동작 대기 시간 부여 및 부하 분산 경로 설정 |
| 특이점 (Singularity) | 관절이 일직선으로 펴짐 → 티칭 포인트 수정 및 특이점 회피 기능 활성화 |
사람을 돕는 최고의 파트너.
안전하고, 쉽고, 유연한 자동화.
2026년형 스마트 협동 로봇으로 귀사의 생산 라인을 인간 중심의 미래형 공장으로 업그레이드하십시오.


