



스텝 모터(Stepper Motor) 완벽 가이드: 정밀 제어의 정석
Stepper Motor
스텝 모터:
정밀 제어의 심장

1.8° 스텝 각도의 정확성과 강력한 저속 토크.
오픈 루프의 간편함에 엔코더를 더한 클로즈드 루프 시스템까지.

1. 스텝 모터(Stepper Motor)란? (Deep Dive)
스텝 모터(Stepper Motor)는 전기적 펄스 신호를 기계적 각도 변위로 변환하는 모터입니다. 한 번의 펄스에 정해진 각도(기본 1.8°)만큼 정확히 회전하며, 정지 시에도 강력한 '홀딩 토크(Holding Torque)'를 유지하여 브레이크 없이도 위치를 고수할 수 있습니다.
2026년형 시스템은 단순한 오픈 루프 방식을 넘어, 엔코더를 장착해 탈조(Step-out)를 방지하는 '클로즈드 루프(Closed-loop)' 기술이 보편화되어 서보 모터의 영역을 대체하고 있습니다.
정밀 제어의 3대 핵심 가치
1. 오픈 루프 제어 (Simplicity)
고가의 엔코더나 복잡한 튜닝 없이도 정확한 위치 제어가 가능합니다. 지령한 펄스 수만큼 정확히 이동하므로 시스템 구성이 간단하고 비용이 저렴합니다.
2. 저속 고토크 (High Torque at Low Speed)
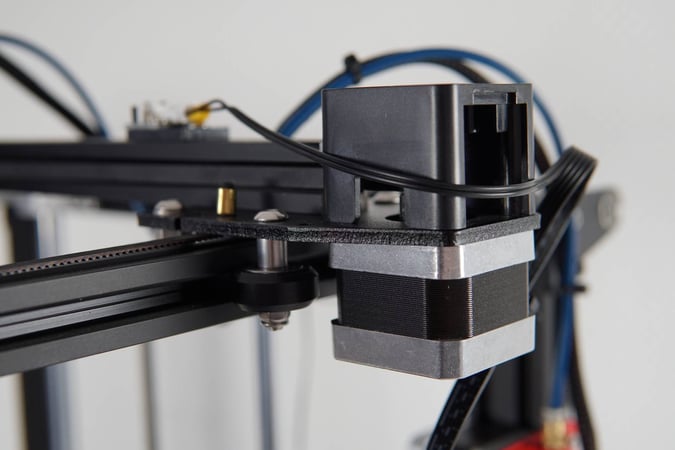
일반 모터와 달리 저속 회전 시 가장 큰 힘을 발휘합니다. 감속기 없이도 무거운 부하를 직접 구동할 수 있어 3D 프린터나 CNC 조각기에 최적입니다.
3. 정지 토크 (Holding Torque)
전원이 공급되는 동안 정지 상태에서 최대 토크로 위치를 고정합니다. 외력에 의해 축이 밀리지 않아 수직 이송 장치나 클램핑 장비에 유리합니다.
2. 기술 심층 분석: 정밀도의 비밀
모터 내부의 구조와 제어 방식이 해상도를 결정합니다. 핵심 기술 3가지를 분석합니다.
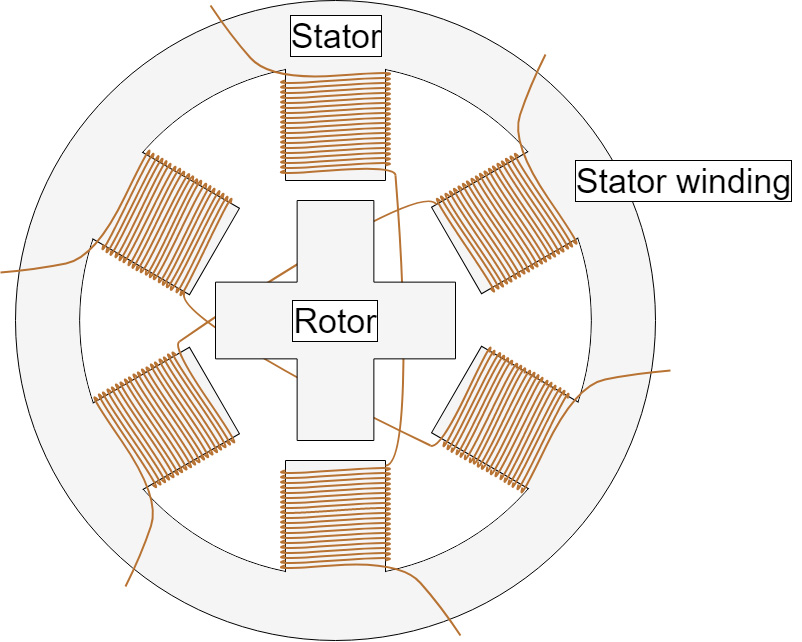
1. 하이브리드 타입 (Hybrid Type)
영구자석(PM)과 가변릴럭턴스(VR) 방식의 장점을 결합했습니다. 1.8°(200분해능) 또는 0.9°(400분해능)의 미세한 스텝 각도를 가지며 산업용 표준으로 쓰입니다.
2. 마이크로스텝핑 (Microstepping)
드라이버가 전류를 정현파(Sine Wave) 형태로 미세하게 쪼개어 제어합니다. 기본 스텝을 1/256까지 분할하여 진동과 소음을 획기적으로 줄이고 해상도를 높입니다.
3. 탈조 방지 (Closed-loop)
모터 뒤에 고분해능 엔코더를 장착하여 실제 위치를 실시간으로 감시합니다. 과부하로 인해 위치가 어긋나면 즉시 보정하여 '탈조' 현상을 원천 차단합니다.
| 구분 | 스텝 모터 (Stepper) | 서보 모터 (Servo) | DC 모터 |
|---|---|---|---|
| 제어 방식 | 펄스 제어 (오픈/클로즈드) | 피드백 제어 (클로즈드) | 전압/전류 제어 |
| 토크 특성 | 저속에서 강함 | 고속까지 일정함 | 속도에 반비례 |
| 가격 | 저렴함 | 비쌈 | 매우 저렴 |
| 주요 용도 | 단거리, 반복 위치 결정 | 고속, 가변 부하, 다축 | 단순 회전, 장난감 |
3. ROI 분석: 서보 대비 가성비 전략
모든 곳에 비싼 서보 모터를 쓸 필요는 없습니다. 부하 변동이 적고 단거리 이동에는 스텝 모터가 경제적입니다.
| 비교 항목 | AC 서보 시스템 (400W급) | 클로즈드 스텝 시스템 (NEMA23) | 절감 효과 (Benefit) |
|---|---|---|---|
| 세트 단가 (모터+드라이버) | 약 60~80만 원 | 약 20~30만 원 | 축당 60% 비용 절감 |
| 튜닝(Tuning) | 게인 조정 필수 (복잡) | 튜닝 불필요 (간편) | 셋업 시간 90% 단축 |
| 헌팅(Hunting) | 정지 시 미세 진동 발생 | 완전 정지 (진동 없음) | 비전 검사 등 흔들림 방지 |
4. 도입 예산 가이드: 사이즈별 적정 솔루션 (Budgeting)
모터의 크기(프레임 사이즈)와 토크, 드라이버 기능에 따라 가격이 결정됩니다.
1. 소형/정밀용 (NEMA 17 / 42mm)
5만 원 ~ 10만 원 (세트)용도: 3D 프린터, 의료기기, 소형 로봇. 작고 가벼우며 좁은 공간에 설치하기 좋습니다. 주로 오픈 루프 방식이 사용됩니다.
2. 일반 산업용 (NEMA 23, 24 / 56~60mm)
15만 원 ~ 30만 원 (세트)용도: 포장기, 컨베이어, 라벨러. 가장 대중적인 사이즈로, 클로즈드 루프 제어와 브레이크 옵션을 추가하여 신뢰성을 높입니다.
3. 대형/고토크용 (NEMA 34 / 86mm)
30만 원 이상 (세트)용도: CNC 라우터, 대형 이송 장치. 4N·m 이상의 강력한 토크를 발휘하며, 감속기 없이도 무거운 부하를 직접 구동합니다.
5. Industry 4.0: 네트워크 기반 모션 제어
펄스열 입력 방식(Pulse Train)을 넘어, 통신으로 제어하고 데이터를 모니터링하는 시대입니다.
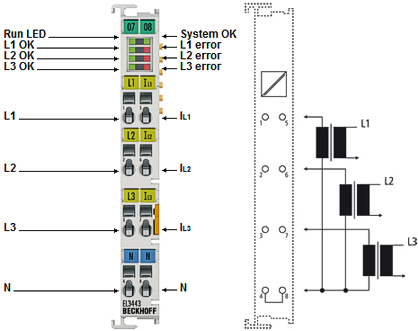
- 필드버스 지원: EtherCAT, Modbus TCP, CC-Link 등 산업용 네트워크를 지원하여 배선을 간소화하고 노이즈에 강한 시스템을 구축합니다.
- 부하 모니터링: 모터에 걸리는 부하를 실시간으로 감지하여, 기구부의 뻑뻑함이나 충돌을 감지하고 예지 보전 데이터를 제공합니다.
- 파라미터 원격 설정: PC 소프트웨어를 통해 전류값, 분해능, 가감속 시간 등을 정밀하게 설정하고 백업할 수 있습니다.
6. 엔지니어를 위한 예방 정비(PM) 체크리스트
| 점검 주기 | 핵심 점검 항목 (Check Point) |
|---|---|
| 매일 (Daily) | 모터 발열(손으로 만져봄), 이상 소음(고주파음), 케이블 연결 상태 |
| 매주 (Weekly) | 축(Shaft)의 유격 확인, 커플링 체결 나사 조임, 벨트 장력 확인 |
| 분기 (Quarterly) | 엔코더 케이블 쉴드 접지 확인, 드라이버 방열판 먼지 청소 |
7. 실무 FAQ: 현장 엔지니어의 핵심 질문
Q. 모터에서 열이 너무 많이 납니다. 정상인가요?
A. 스텝 모터는 정지 시에도 위치 유지를 위해 전류가 흐르므로 표면 온도 70~80°C까지는 정상입니다. 손을 댈 수 없을 정도라면 'Current Down(정지 시 전류 감소)' 기능을 설정하거나 쿨링팬을 설치해야 합니다.
Q. 고속에서 '우웅' 소리만 나고 돌지 않습니다. (Stall)
A. 탈조(Stall) 현상입니다. 모터의 토크가 부하보다 부족하거나, 가속 시간이 너무 짧을 때 발생합니다. 속도를 낮추거나, 가감속 시간(Acc/Dec Time)을 늘리거나, 더 큰 용량의 모터로 교체해야 합니다.
Q. 특정 속도에서 진동이 심해집니다. (Resonance)
A. 공진(Resonance) 영역입니다. 마이크로스텝 분해능을 높이거나(예: 1/2 → 1/8), 모터 축에 댐퍼(Damper)를 달면 해결됩니다. 최신 드라이버는 '진동 억제 제어' 기능이 있어 이를 자동으로 잡아줍니다.
8. 산업별 성공 도입 사례 (Case Study)
기존 드라이버의 소음 문제를 해결하기 위해 TMC 계열의 저소음 드라이버(Silent Step)를 적용했습니다. 모터 소음이 거의 사라지고, 적층 면의 물결무늬(Artifact)가 제거되었습니다.
서보 모터의 헌팅(정지 후 미세 진동)으로 인해 카메라 초점이 흔들리는 문제가 있었습니다. 정지 토크가 강력한 클로즈드 루프 스텝 모터로 교체하여 이미지 획득 시간을 단축했습니다.
협소한 공간에 다수의 축을 배치해야 했습니다. 드라이버와 컨트롤러가 모터 뒷면에 일체형으로 결합된 'All-in-one' 스텝 모터를 사용하여 배선을 줄이고 장비 크기를 소형화했습니다.
9. 도입 후 트러블 사례와 사전 대책 (Troubleshooting)
| 장애 현상 (Symptom) | 원인 분석 (Cause) | 해결 (Solution) |
|---|---|---|
| 위치 틀어짐 (Step Loss) | 기구적 걸림, 커플링 헐거움, 노이즈 | 기구부 점검, 나사 조임, 펄스 라인 쉴드 처리 |
| 모터 회전 방향 반대 | 배선 오결선 (A/B상 바뀜) | A+, A- 배선을 서로 바꾸거나 드라이버 설정 변경 |
| 전원 투입 시 '틱' 소리 | 초기 여자(Excitation) 소음 (정상) | 드라이버의 초기 위치 검출 기능이므로 정상 |


